

Como Montar um Braço Robótico com Arduino: Guia Completo + Lista de Peças (2026)
Se você é apaixonado por robótica e automação, poucas coisas são tão gratificantes quanto escrever um código, apertar um botão e ver uma máquina física ganhar vida. Montar um braço robótico é o “rito de passagem” perfeito para quem quer sair da teoria e entrar na automação industrial na prática.
Além de ser um projeto incrível para apresentar em feiras de ciências, TCCs ou simplesmente para enfeitar a sua bancada de trabalho, ele ensina conceitos reais de cinemática e controle de motores.
Neste guia, vamos te mostrar exatamente como o projeto funciona e, o mais importante, a lista completa de peças para você não comprar nada errado na hora de montar o seu.
Por que começar com um Braço Robótico?
Na indústria automotiva e nas fábricas de alta tecnologia, os braços robóticos (como os famosos robôs da KUKA ou ABB) são a espinha dorsal da automação. Montar uma versão em miniatura com Arduino vai te ensinar a lidar com:
- Servomotores: O coração da movimentação precisa.
- PWM (Modulação por Largura de Pulso): A técnica usada para controlar os ângulos dos motores.
- Lógica de Programação: Como coordenar vários movimentos ao mesmo tempo.
Lista de Componentes (Onde e o que comprar)
Para facilitar a sua vida, separamos os melhores componentes com ótimo custo-benefício. Certifique-se de adquirir peças de qualidade para que seu robô não sofra com “tremedeiras” ou falta de força.
(Dica: Ao comprar no Mercado Livre, verifique se os vendedores possuem o selo Mercado Líder para garantir entregas rápidas).
1. A Placa Controladora: Arduino Uno R3
O cérebro do projeto. Para iniciantes, não há opção melhor. Ele possui a quantidade perfeita de portas PWM para controlar os motores do seu braço.
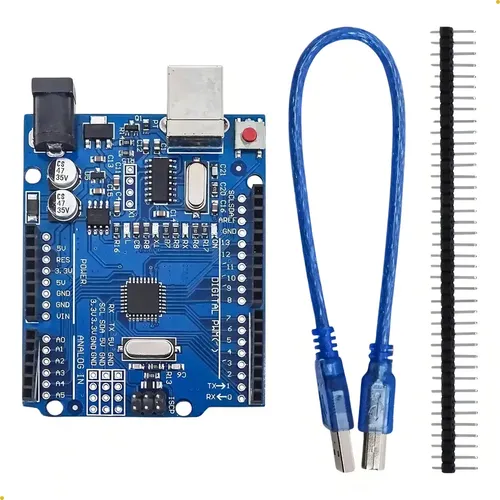
- Microcontrolador ATmega328P com frequência de clock de 16 MHz. | Capacidade de memória flash de 32 KB. | 6 entradas anal…
2. A Estrutura Física: Kit Braço Robótico em Acrílico ou MDF
Você não precisa construir as garras e as bases do zero. Existem kits mecânicos pré-cortados a laser que já vêm com os parafusos e as engrenagens no tamanho exato. Recomendamos as versões em acrílico pela durabilidade.

Características principais
Marca: BR ELETRONICA
Modelo: BRAÇO ROBÓTICO
Comprimento x Largura x Altura: 14.3 cm x 9.3 cm x 15 cm

Características principais
Marca: TP3D
Modelo: Kit Acrilico Brazo Robotico

Características principais
Marca: BACCO MIX
Modelo: Braço MDF
Comprimento x Largura x Altura: 14.3 cm x 9.3 cm x 15 cm
3. Os “Músculos”: Servomotores (4 a 6 unidades)
Dependendo da complexidade do seu kit (4 ou 6 eixos de movimento), você vai precisar de servomotores.
- Para robôs pequenos (MDF leve): Os Micro Servos SG90 dão conta do recado.
- Para robôs médios (Acrílico ou peças de metal): Invista nos Servos MG996R com engrenagens de metal, que têm muito mais torque e não quebram os dentes internos.

- Voltagem máxima de 6V para um desempenho ideal em aplicações diversas. | Compacto com dimensões de 3.2 x 1.2 x 3 cm. | L…

- Voltagem mínima e máxima de 5V para operação eficiente. | Engrenagem de metal para maior durabilidade e desempenho.

- Voltagem operacional de 3V a 7.2V. | Peso leve de apenas 9 gramas. | Cabo de 24 cm para fácil conexão. | Engrenagens de …



Características principais
Marca: Generic
Modelo: Generic
4. Alimentação: Módulo de Fonte ou Fonte de Bancada
Atenção aqui! Um erro clássico de iniciantes é tentar alimentar 4 motores direto pela porta 5V do Arduino. Isso vai queimar a sua placa! Você precisa de uma fonte externa (como um módulo de fonte ajustável ou uma bateria) para alimentar apenas os motores, ligando apenas o fio de “sinal” na sua placa.

Características principais
Marca: GA
Modelo: Protoboard
Outros
Voltagem mínima de entrada – Voltagem máxima de entrada: 5V – 5V
É kit: Não
Dimensões
Comprimento: 8,9 cm
Largura: 12,5 cm
Altura: 2 cm

Características principais
Marca: Sylc
Modelo: 800157
Potência: 9 W
Outros
Materiais: Plástico
Frequência: 50/60Hz
Voltagem mínima de entrada – Voltagem máxima de entrada: 100V – 240V
Voltagem mínima de saída – Voltagem máxima de saída: 9V – 9V
Dimensões
Comprimento: 9 cm
Largura: 3 cm
Altura: 7 cm
5. Protoboard (ou Matriz de Contatos)
Essencial para fazer as conexões temporárias de forma rápida e segura. Uma protoboard de 830 pontos ou de 400 pontos é perfeita para organizar os fios de alimentação e sinal de todos os servos e ligá-los ao Arduino sem solda.

- Dimensões de 16,5 x 5,5 cm para facilitar a prototipagem. | Material ABS durável e resistente para uso prolongado.

- Protoboard com 830 pontos, ideal para projetos eletrônicos e didáticos. | Fonte de alimentação com saídas de 3.3V e 5V. …

Características principais
Marca: Generic
Modelo: Bread junction
Dimensões
Comprimento x Largura x Altura: 18.3 cm x 8.8 cm x 4.5 cm

- Ideal para projetos de eletrônica. | Compatível com Arduino e PIC. | Facilita montagem e testes de circuitos.
6. Kit de Cabos Jumper (Macho-Macho, Macho-Fêmea e Fêmea-Fêmea)
Você precisará de dezenas desses cabos para conectar os servos à protoboard e ao Arduino. Um kit variado com cabos de diferentes tamanhos e tipos (principalmente macho-macho para ir da protoboard ao Arduino e macho-fêmea para os servos) é a melhor opção para garantir que você tenha o cabo certo para cada conexão.

- Unidades por kit: 120. | Formato de venda: Kit. | Comprimento de 10cm para versatilidade em conexões. | Revestimento em …
O Passo a Passo da Montagem (Resumo)
- Calibração dos Motores: Antes de parafusar os motores na estrutura de acrílico, ligue-os no Arduino e mande um código para que todos fiquem no ângulo de 90 graus. Isso garante que o robô não será montado “torto”.
- Montagem Mecânica: Siga o manual da estrutura para montar a base, os “ombros”, os “cotovelos” e, por fim, a garra.
- A Eletrônica: Conecte o fio de sinal de cada motor em uma porta digital PWM do Arduino (como os pinos 3, 5, 6, 9, 10 ou 11).
- A Programação: Use a biblioteca nativa
<Servo.h>do Arduino. Com o comandomeuMotor.write(angulo);, você começará a dar vida ao seu robô!